
1.電気構成
PLC:CPU1214C (SIEMENS)、S7-200 SMART
HMI:KTP1200 ベーシックPN(シーメンス)
インバータ:FC360
2. ソフトウェアのコミッショニング
PLCソフトウェア:TIA Portal V15(SIEMENS)、SMART V2.4
HMIソフトウェア:TIA Portal V15(SIEMENS)
周波数変換器およびCPU通信方式:PN通信 インバータ試運転ソフトウェア:VLT_MCT10_V5.21
3.機械のワンアクション試運転
1.1 電源投入時の試運転を開始します。 (通常、工場では試運転前に通電されています)
1.2 ケージ、テーピングユニット、およびキャタピラモーターの「モーターセルフチューニング」。セルフチューニングを完了するには、次の基本パラメータを設定します。
| 0-01 言語 | 英語 | 英語 |
| 1-20 モーター出力 | KW | モータ銘板に従って入力してください |
| 1-22 モーター電圧 | 五 | モータ銘板に従って入力してください |
| 1-23 モーター周波数 | ヘルツ | モータ銘板に従って入力してください |
| 1-24 モーター電流 | あ | モータ銘板に従って入力してください |
| 1-25 モーター定格速度 | 回転数 | モータ銘板に従って入力してください |
| 1-39 モーター極 | モータ銘板に従って入力してください | |
| 5-12 端子 DI 1 デジタル入力 | 機能なし | 機能なし |
| 1-29 自動モーター調整 | オプション1、完全な自己調整 | オプション1、完全な自己調整 |
| 3-02 最小基準値 | 0 | 0 |
| 3-03 最大基準値 | ヘルツ | モータ銘板に従って入力してください |
- 各車体のシングルアクションアイドリング。ローカル制御インバータの開ループ動作。16_67 エンコーダの方向が正であるかどうかを監視します。そうでない場合、エンコーダの方向はモータの方向と逆です。
エンコーダの方向を変更します。1. インバータの電源がオフのときに、エンコーダ信号入力 A と信号 B を入れ替えます。2. パラメータ 5_71 エンコーダの方向を調整します。
4.インバータパラメータ設定
インバータのパラメータは下表を参考に設定します。
| ケージ | キャタピラー | テーピングユニット(n) | |||||
| 1-00 | 1 | 1 | 1 | ||||
| 1-01 | 1 | 1 | 1 | ||||
| 1-20 | モータ銘板に従って入力してください | ||||||
| 1-22 | モータ銘板に従って入力してください | ||||||
| 1-23 | モータ銘板に従って入力してください | ||||||
| 1-24 | モータ銘板に従って入力してください | ||||||
| 1-25 | モータ銘板に従って入力してください | ||||||
| 1-82 | 0.5 | 0.5 | 0.5 | ||||
| 3-00 | 1 | 1 | 1 | ||||
| 3-02 | 0 | 0 | 0 | ||||
| 3-03 | 描画ドライブに応じた計算 | ||||||
| 3-41 | 1.0 | 1.0 | 1.0 | ||||
| 3-42 | 1.0 | 1.0 | 1.0 | ||||
| 4-10 | 2 | 2 | 2 | ||||
| 4-20 | 0 | 0 | 0 | ||||
| 5-12 | 2 | 2 | 2 | ||||
| 5-40 | 5 | 5 | 5 | ||||
| 5-42 | 60 | 60 | 60 | ||||
| 8-04 | 5 | 5 | 5 | ||||
| 8-10 | 0 | 0 | 0 | ||||
| 915.0 | コントロールワード | ||||||
| 915.1 | 参照語 | ||||||
| 915.2 | デザインニーズ | ||||||
| 916.0 | ステータスワード | ||||||
| 916.1 | フィードバック値 | ||||||
| 916.2 | モーター電流 |
5.HMIとPLCプログラム
5.1 HMI の IP アドレス設定: 「設定」をクリックして設定を入力します。
5.1.1 PN/IE を選択し、「プロパティ」をクリックして入力します。
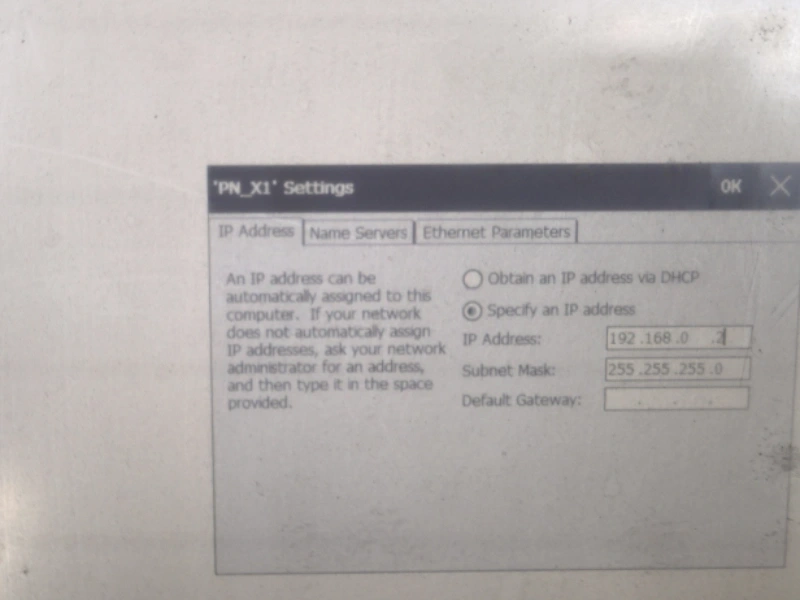
5.1.2 IPアドレス192.168.0.2を手動で設定する
5.2 HMI プログラムのダウンロード:プロジェクトを開き、HMI を選択して、[ダウンロード] をクリックします。次の画面が表示されます。
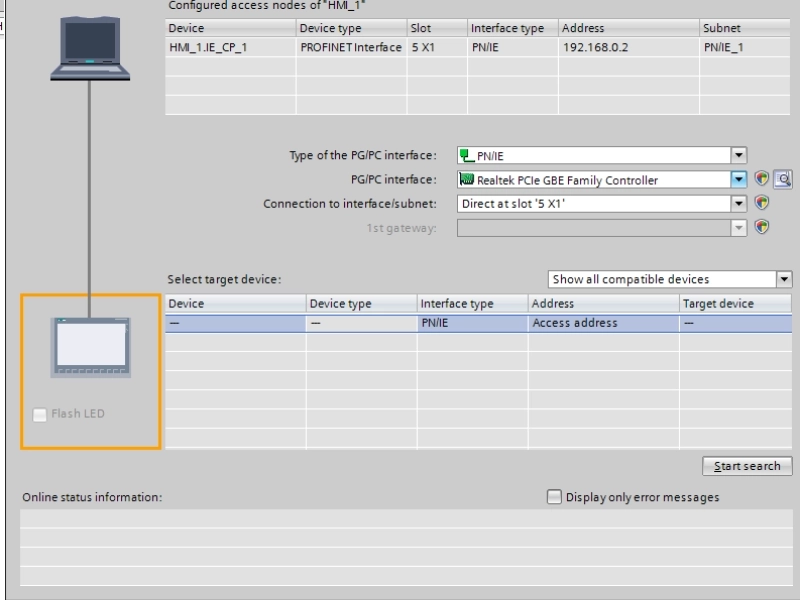
画像には 192.168.0.2 が表示されます。選択してロードをクリックします。
5.3 プログラムをダウンロードした後、すべてのインバータとモジュールが正常に通信しているかどうかを確認します。


注意: 通信中断インバータは W34 を報告します。
5.4 ブレーキユニットのディップスイッチは電源を切った状態で操作する必要があります。


6.機械全体の連携
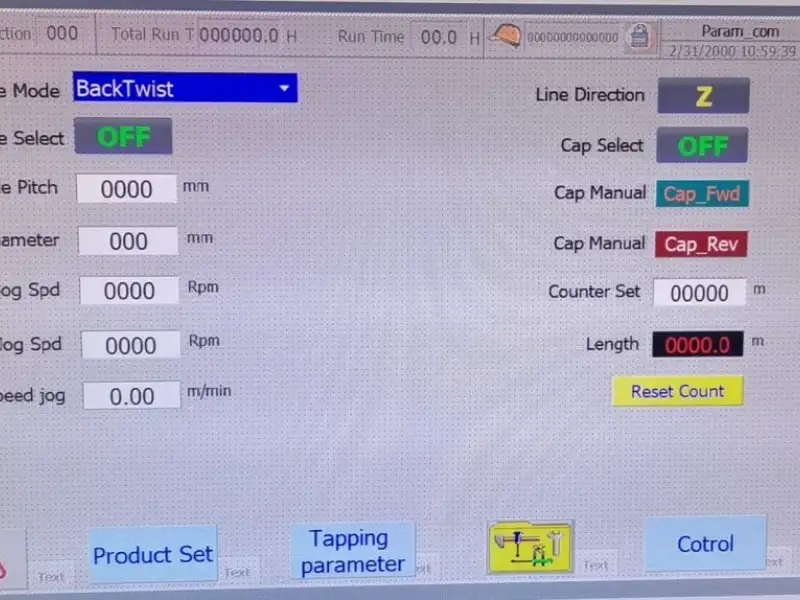
6.1 マシン全体をリンクする前に、以下のパラメータを設定する必要があります。.
6.2 キャタピラー、ケージ、テーピングユニットのテストを順番に実行し、停止して切り替え方向をテストします。
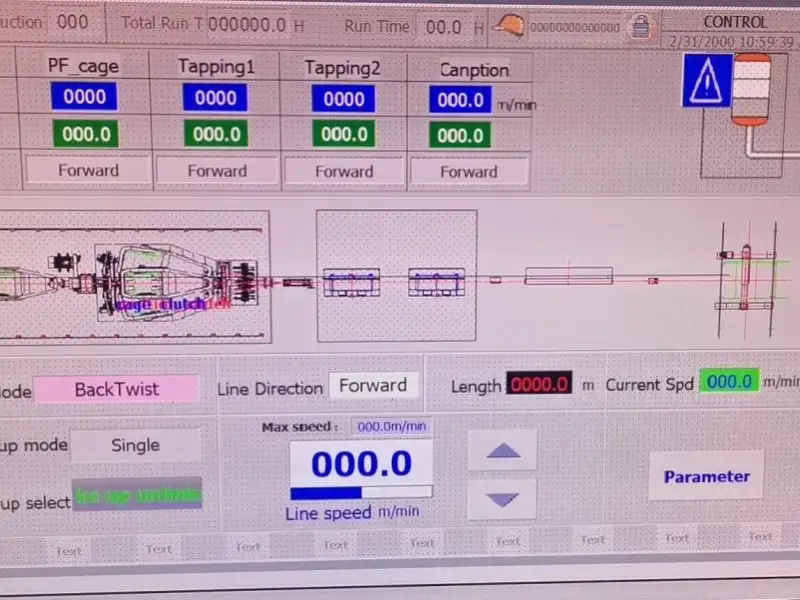
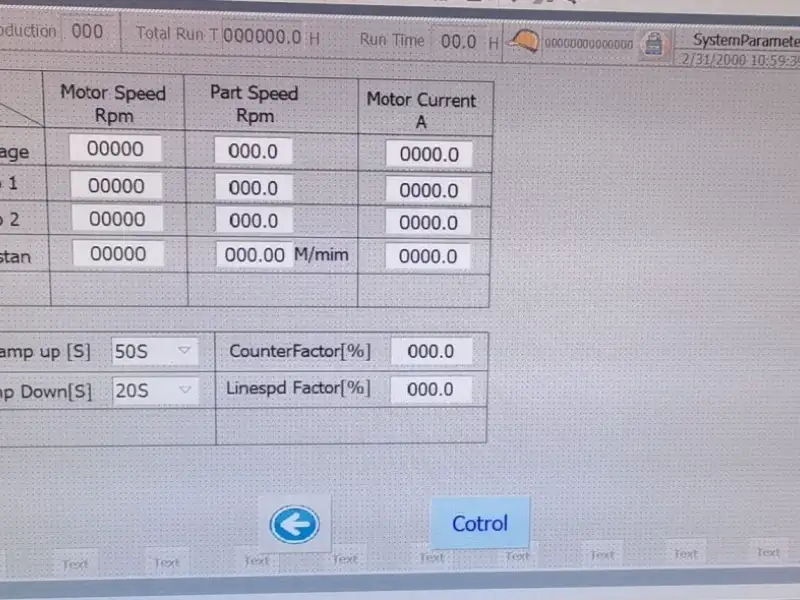
6.2.1 機械を低速から高速まで観察し、各部のモーター速度と電流が正常かどうかを確認します。
6.2.2 製品ケーブルを接続する前に、無負荷状態で 2 時間以上連続して障害なく動作している必要があります。
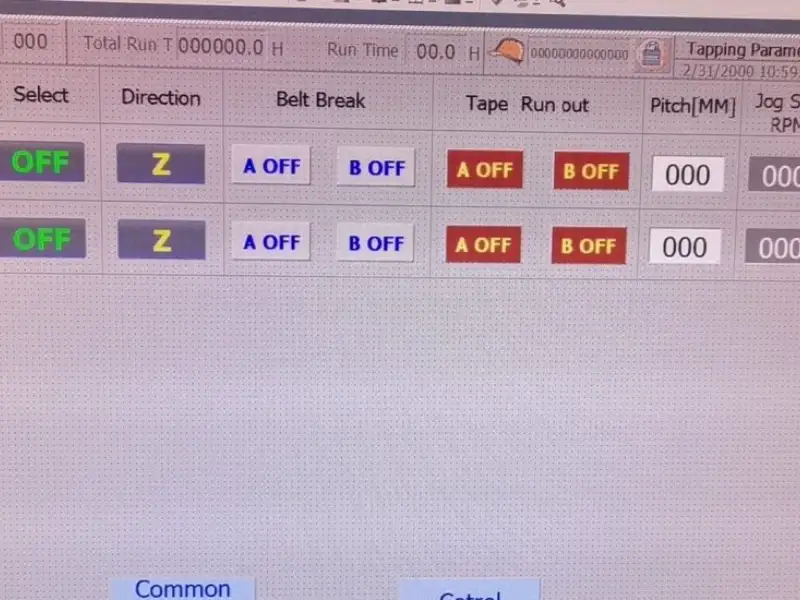
6.2.3 実際のピッチがインターフェース設定ピッチと同じかどうかを確認し、異なる場合は修正します。